ロータスクラブが運営するクルマとあなたを繋ぐ街「ロータスタウン」
みらいのくるまの「ただいまのところ」情報
「トラック隊列走行実証実験」のその後 ― 研究所コースにて、“後続車無人隊列走行”に踏み込む
2018年8月23日更新

2022年以降に高速道路(新東名、東京~大阪間)での後続車無人隊列走行の事業化を目指した、トラック隊列走行実証実験が去る1月23日から開始され、その模様をこのコーナーでも紹介した。公道でのトラック隊列走行は見る者に“みらい”を予感させたが、それは実験の一段階に過ぎなかった。ここでは、“その後”の実証実験についてまとめてレポートする。
2022年以降の隊列走行事業化に向け
今年の実証実験は重要なステップ
いま、日本の物流を担うトラック業界のドライバー不足が大きな問題となっている。そして、それは今後ますます深刻化していくことが予想されている。
この問題を解消するためにはどうすればいいのか?
大胆な業務効率化策が必要といわれているのだが、とくに最新の自動運転技術の導入による業務効率化策には大きな期待が寄せられている。
たとえば高速道路上でトラックが隊列を組んで走る場合、車両にCACC(Cooperative Adaptive Cruise Control:協調型車間距離維持支援システム)をはじめとする各種自動運転技術を導入すれば、先頭の車両はドライバーが運転するにしても、後に続く車両は自動(=無人)で走らせられる。
つまり、複数台のトラックをたった一人で走行させられるようになるため、ドライバー不足という問題の解決に一つの解をもたらすことになるのである。
ドライバー不足・業務効率化策という視点からトラック隊列走行について述べたが、それに止まらず未来の日本を変えていく移動革命を実現する取り組みとして、トラック隊列走行など物流の改革がスピードを持って行われているのである。
では、トラック隊列走行はいつ実現するのか。国は、高速道路(新東名)を使った東京~大阪間での後続車無人隊列走行の実現と事業化を2022年以降に実現させたいとしている。
そのために、経済産業省と国土交通省は、トラック隊列走行実証実験事業を2016年度から18年度の間、豊田通商に委託している。
つまり、2018年度は、2022年以降の事業化に向けた一つの節目として明確な成果が問われる重要なタイミングとなっていると言えるだろう。
1月30日~2月1日に北関東自動車道で
公道上での2回目の実証実験を実施
2018年1月23日~25日に新東名高速道路の浜松SA―遠州森町PA間で行われた初めての「トラック隊列走行実証実験」に関しては、以前、このコーナーでルポ(https://www.lotascard.jp/column/future/6489/)にまとめて詳細を紹介した。
そのときは、公道上を異なるトラックメーカーの3台のトラックが自動運転技術のCACCで繋がって隊列を組んで走るのは世界初ということもあり、取材に当たってかなり画期的な実験であるという印象を持った。
ただ、事業化に向けては自動運転技術のクオリティを向上させることに加えて、実際の道路の状況などへの対応も具体的に培って行かなければならない。
そのために、実証実験を繰り返し、トライ&エラーで技術を磨き、地道な経験値の蓄積を図ることが重要といえる。
2回目の公道での実証実験は、1回目の直後、1月30日~2月1日に北関東自動車道の壬生PA―笠間PAで実施された。
この時も、異なるトラックメーカーが製造したトラック4台が使用され、前回は3台の隊列走行のみであったのに対し、4台での隊列走行を行った。これについて、「走行自体は成功したものの、渋滞を招くなど周囲への影響の懸念がある」との見解が示されている。
2回目の主なテーマとしては、勾配3%の北関東道において「道路高低差への対応等の技術的な検証」を行うことであった。要は、上り坂、下り坂など高低差によって車間距離への影響が出るかどうか、それについてCACCが正常に動作してアクセル・ブレーキをコントロールできるかどうかといったことである。このテーマについては、走行条件が極めて安定していたためCACCは正常に動作したが、それゆえ「道路高低差への対応」についてはより勾配の大きな道路などでの実証実験をいずれ行う可能性を視野に入れるとしている。
それとは別に、現実的な課題が浮上した。50km×12回の実証実験走行中に20回の割り込みが発生しており、車間距離および合分流時などの走行方法について検討する必要があると分かったのである。新東名での実証に比べて割込み回数が大幅に増加したのは、「全走行区間が2車線、合流部の加速車線が短い、4台隊列により車列が長い、合分流箇所が多い」といったことが影響したようだ。
6月28日に産業技術総合研究所つくばセンターで
「後続車無人隊列走行技術」の実験を公開
その後も実験は続く。
この6月28日、産業技術総合研究所つくばセンターの北サイト内で行われた実験が報道陣に公開された。主要な実験テーマは、「後続車無人隊列走行技術」である。
今回の実験では、次のような走行シーンが取材陣に公開された。
◎初回の実験では車間距離が30~40メートルの隊列走行となっていたのだが、この実験では最大時速約70キロメートルで、わずか約10メートルの車間距離で隊列走行を実施した。
◎初回の実験では後続2台に乗るドライバーはアクセルとブレーキは操作しないもののハンドル操作は行っており、いわば半自動の状態だったわけだが、この実験ではハンドル操作にもドライバーは関与せず、走行に関する操作のすべてがほぼ自動で行われた。
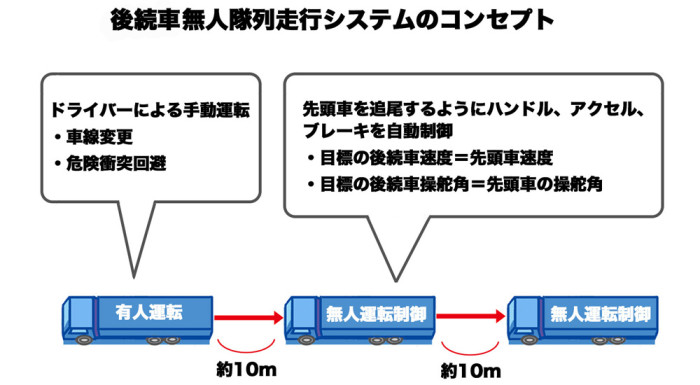
今回の後続車無人隊列走行の技術について要約すると次のようになる(ちなみに、その技術を担うのは、自動運転技術の開発を手掛けるベンチャー企業「先進モビリティ株式会社」である)。
先頭車ではドライバーが運転を行い、車車間通信とミリ波レーダー(車間距離センサー)で構成されるCACCによって隊列を組む2台の後続車を制御し、先頭車に追従して速度維持、加減速、ハンドル操作を自動的に行う(今回の実験では、後続車のドライバーはハンドル操作、ブレーキ・アクセル操作は一切行わなかった)。
先頭車を追尾するセンサーとして、後続車にはGPS(全地球測位システム)とライダー(光検出・測距)の2種類を使用している(通常はGPSを用い、通信感度が低下する場所ではGPSからライダーへ切り替えて対応)。
また、急制動の実験も行われた。先頭車が時速70キロメートルで走行している状態から急ブレーキを掛けたところ、後続車もこれに追随し、車間距離は安定的に保たれた。
今回の実験公開で、時速約70キロメートルで約10メートルの車間距離を保って隊列走行を実施したのは、公道上での実証実験において頻発した割り込みに対する対策の意味もある。
現在の車両技術に対するガイドラインでは、「時速80キロメートルで車間距離22メートル」が限界と考えられているが、国は後続車無人隊列走行での「電子けん引」に関する制度を今秋にも改正する意向で、19年1月に予定している後続車無人隊列走行の公道実証実験は「時速80キロメートルで車間距離22メートル」という設定をさらに短縮して実施する可能性があるという。
2022年以降に、高速道路(新東名)を使った東京~大阪間での後続車無人隊列走行の実現と事業化に向けて、さらなる技術開発と実証実験が続く。




あわせて読みたい
-

みらいのくるまの「ただいまのところ」情報
BookReview(54)『ドライブイ…
いまは密かな昭和レトロブーム。ドライブイン人気もそのひとつだ。この本は、一見、そうした流行を当て込んで書かれたガイド本かと思えるが、そうではない。本書には既…
2024.06.13更新
-

みらいのくるまの「ただいまのところ」情報
『第11回オートモーティブワールド』ルポ…
東京ビッグサイトで2019年1月16日から18日に開催された『第11回オートモーティブワールド』。この会場で、次世代自動車の分野で躍進が著しいといわれる中国の現…
2019.02.12更新
-

みらいのくるまの「ただいまのところ」情報
2022全日本EVグランプリシリーズ第3…
「走る姿が実に美しい」2022全日本EVグランプリシリーズ(AllJAPANEV-GPSERIES)第3戦。マツダのMX-30のEVモデルが、EV-3ク…
2022.07.21更新
-

みらいのくるまの「ただいまのところ」情報
2021全日本EVグランプリシリーズ 第…
今季スポット参戦ながら、その速さで周囲をざわつかせている女性ドライバーの今橋彩佳選手。なぜ、そんなに速いのか?いったいどんな経歴の選手なのか?レースが終わっ…
2021.08.27更新
-

みらいのくるまの「ただいまのところ」情報
2021全日本EVグランプリシリーズ 第…
ハロウィン当日となった10月31日の日曜日。千葉県の袖ケ浦フォレストレースウェイで、2021全日本EVグランプリシリーズ(ALLJAPANEV-GPSER…
2021.11.16更新
-

みらいのくるまの「ただいまのところ」情報
日本EVクラブ主催『第24回 日本EVフ…
ルポの最後に、フェスティバルに参加した若い人たちの声を載せておきたい。興味深かったのは、みんな、口を揃えて「エンジン車もEVも両方大好き」と語っていたことだ。…
2018.11.22更新
-
- 新着記事
- 人気記事
- クルマのコラム
- プレゼント・キャンペーン情報
- サイト内検索
-




![Vol.1 デート帰りの深夜0時に、民家の塀をこすっちゃった。さて、どうすればいい?[前編]](/managed/wp-content/uploads/2015/10/1143d85a60cc76b8894376be0504aa15-100x65.jpg)




